
1.���ƴ���Դ��
2.点云|CloudCompare源码编译教程
3.浅谈:点云库Open3D、点云点PCL以及CGAL(C++)
4.PCL入门系列一——PCL简介及PCL安装
5.Cartographer源码详解|(2)Cartographer_ros
6.坐标转换&点云变换&姿态互转| TransForms3d

���ƴ���Դ��
点云处理深度学习方法需应对置换不变性和旋转不变性。处理处理点云原始数据的源码稀疏性是三维方法共同挑战。PointNet解决置换不变性,开源库使用对称函数如最大值函数,点云点高维特征提取后最大化,处理处理ios cocos2d 源码降低低维损失。源码PointNet通过T-Net矩阵保证旋转不变性,开源库该矩阵转换任意角度输入至正面点云。点云点PointNet整体架构如图所示。处理处理
PointNet++是源码PointNet改进版,PointNet在分类和Part Segmentation表现良好,开源库但在Semantic Segmentation受限。点云点PointNet++依据2D CNN思想改进,处理处理通过SA模块进行特征学习。源码模块首先采样关键点,围绕每个关键点选取球形区域内点作为Grouping,应用PointNet提取特征。每个点特征不仅包含自身信息,还融合领域内周围点关系。关键点坐标变换确保不变性,输入变换后球形区域内点相对关系确定。最终得到的点特征包含多层次特征学习结果。PointNet++通过不同分辨率和尺度的Grouping解决点云稀疏性影响。
总结,PointNet和PointNet++在点云处理中各有优势。PointNet通过置换不变性和旋转不变性处理策略,实现对点云数据的有效学习。PointNet++进一步通过多层次特征学习和关键点选择,提高对点与点关系的捕捉能力。两者的架构和策略设计旨在优化点云数据处理效率和精度,满足不同应用需求。
点云|CloudCompare源码编译教程
这篇教程详细介绍了如何在VS中配置并使用CloudCompare的源码。首先,推荐参考的博客提供了更为详尽的库配置,包括LasTool和PDAl等。
步骤一:在VS中,进入工具选项,搜索并安装Qt Visual Studio Tools,建站源码怎样使用按照安装流程直到结束。关闭页面后,退出VS,并等待VSIX Installer的安装。
安装完成后,打开VS,你将看到Qt VS Tools的工具栏,方便后续操作。
接着,你需要下载适合自己VS版本的QT,可以从download.qt.io获取。安装时,确保选择与VS兼容的版本,并在系统设置中更新环境变量,例如将QT安装路径(本文示例为D:\QT\5.9.8\msvc_\bin)添加到系统路径中。
最后,访问GitHub上的CloudCompare源码仓库(github.com/CloudCompare),下载Release Version 2..2版本的源码。至此,VS的配置和CloudCompare源码的下载与安装就已完成,你可以开始下一步的开发工作了。
浅谈:点云库Open3D、PCL以及CGAL(C++)
本文旨在比较分析点云处理库Open3D、PCL及CGAL(C++),以深入理解其特性、功能与上手难度。
Open3D,一个面向对象的点云库,提供了丰富的点云与曲面网格算法。其语言设计简洁,易于理解,适合初学者。Open3D模块化高,内聚松耦合,代码量较少,适合快速开发。然而,泛型编程实现较少,杯柄形态源码代码复用性与灵活性不及PCL和CGAL。
PCL是一个大规模、独立的开源项目,广泛用于2D/3D图像与点云处理。其大量使用泛型编程,提供丰富的点云算法,尤其在点云数据处理方面优势明显。虽然计算效率一般,但学习成本较高,适合深入学习泛型编程。
CGAL(计算几何算法库)是一个大型C++几何库,提供几何数据结构与算法,如Delaunay三角网、网格生成等。CGAL提供复杂的几何内核,实现完全分离状态,复用性和灵活性高。学习CGAL需具备一定基础,其源码提供丰富学习资源。
在可视化方面,CloudCompare及Meshlab提供插件式与非插件式二次开发,强调美观简洁,适合处理可视化问题。这两个项目提供大量源代码,涉及点云分割、曲面拟合、分类与曲面重建等,值得学习借鉴。
学习建议:面对错误,不应害怕,这是学习过程的必要部分。持续学习,保持积极态度。了解这些库的局限,早睡早起,保持身体健康。最后,阅读前保持批判性思维,手机公众号源码验证信息。
PCL入门系列一——PCL简介及PCL安装
三维数据描绘着我们世界的丰富面貌,从城市到乡村,从海洋到深空。面对这样的数据,计算机如何理解?点云数据,作为三维世界的基本表现形式之一,成为了连接现实与算法的桥梁。为了解读点云数据,让我们一起探索PCL库的世界,让计算机理解三维数据。
点云处理的利器——PCL
PCL(Point Cloud Library)是用于处理点云数据的强大开源项目。官网文档虽不甚美观,但内容详尽丰富,涵盖了点云分割、分类、校准与可视化等多个应用领域。无论是在工业应用中解决实际问题,还是在科研项目中进行创新探索,PCL都能发挥重要作用,为三维数据处理领域提供强大支持。
从源码到安装,PCL的获取与部署
PCL的安装方式多样,包括预编译的二进制文件和源码安装。操作系统兼容性广泛,支持Windows、Linux和Mac系统。对于希望深入学习PCL的用户,推荐使用Linux系统并从源码进行编译。尤其在结合CUDA编程时,Linux系统的使用将更为便捷。使用docker也是个不错的选择,详情请参考相关指南。
Ubuntu下从源码安装PCL的步骤
了解了PCL的安装方式后,让我们聚焦Ubuntu下的源码安装流程。首先,访问官方操作链接获取所需PCL版本,下载并解压。小程序 演示 源码以1.7.2为例,您可选择更新至1.9.X版本。至此,从源码安装PCL的过程即告完成。
Cartographer源码详解|(2)Cartographer_ros
上一篇文章深入分析了传感器数据的流向,接下来让我们继续探讨传感器格式的转换与类型变换。这部分内容在sensor_bridge.cc文件中。在处理传感器的坐标变换时,我们需要运用三维空间刚体运动的知识,先进行简要回顾,以助于理解代码。
三维空间刚体运动涉及向量内积与外积。向量内积的计算公式如下,表示两个向量的点乘。向量外积则是一个向量,其方向垂直于两个向量,大小为两向量张成四边形的有向面积,计算公式如下。
旋转和平移是欧氏变换的两个关键部分。旋转涉及单位正交基的变换,形成旋转矩阵(Rotation matrix),该矩阵的各分量由两组基之间的内积组成,反映了旋转前后同一向量坐标的变化关系。平移则通过向旋转后的坐标中加入平移向量t实现。通过旋转矩阵R和平移向量t,我们可以完整描述欧氏空间中的坐标变换关系。
为了简化变换过程,引入齐次坐标和变换矩阵。在三维向量末尾添加1形成四维向量,进行线性变换。变换矩阵T能够将两次变换叠加简化为一个操作,便于后续计算。
Cartographer的坐标转换程序位于transform文件夹下的rigid_transform中,用于求解变换矩阵的逆。
在sensor_bridge类中,构造函数将传入配置参数,对里程计数据进行处理。首先将ros时间转换为ICU时间,然后利用tf_bridge_.LookupToTracking函数找到tracking坐标系与里程计child_frame_id之间的坐标变换。在ToOdometryData函数中,将里程计的footprint的pose转换为tracking_frame的pose,并最终将结果转换为carto::sensor::OdometryData的数据类型。
HandleOdometryMessage函数将传感器数据类型与坐标系转换完成后,调用trajectory_builder_->AddSensorData进行数据处理。对于雷达数据,首先转换为点云格式,然后对点云进行坐标变换,并调用trajectory_builder_->AddSensorData进行数据处理。
IMU数据处理中,要求平移分量小于1e-5,然后调用trajectory_builder_->AddSensorData对数据进行处理。
在雷达数据处理部分,首先将点云数据分段,然后传给HandleRangefinder处理,将点云坐标变换到tracking_frame坐标系下,调用trajectory_builder_->AddSensorData函数进行数据处理。
总结本章内容,我们详细解析了SensorBridge类,对传感器数据进行了转换和传输。通过Node类、MapBuilderBridge类和SensorBridge类,我们对Cartographer_ros部分的代码有了基本了解。接下来,我们将深入学习cartographer。
坐标转换&点云变换&姿态互转| TransForms3d
本文分享的开源库TransForms3d,专为坐标转换和点云变换提供解决方案,基于Eigen库构建,无需额外依赖,适用于机器人开发和导航系统构建。 开源地址:gitee.com/ohhuo/transfo... 或 github.com/fishros/tran... 该库提供丰富的函数,覆盖角度、欧拉角、四元数和齐次矩阵等基础转换,以及坐标变换组操作。安装与使用
1. **源码引入**:将trans_forms_group.cpp,trans_forms.cpp,transforms3d.h文件复制至项目中。 2. **编译安装**:根据项目需求进行编译。 3. **使用样例**:- **手眼矩阵估算**:通过TransformsGroup实现。
- **点云坐标转换**:利用TransformsGroup完成。
- **欧拉角转换**:支持多种格式转换。
函数列表
基础部分:角度、弧度、欧拉角、四元数、齐次矩阵等转换。 坐标变换组:添加、打印、查找坐标转换关系。鸣谢与反馈
欢迎贡献代码、提供反馈,共同提升TransForms3d库的性能与功能。插件介绍点云处理插件COCKROACH
COCKROACH插件是一款开源的点云处理工具,由Petras Vestartas和Andrea Settimi共同开发。
此插件依托于Open3D、CGAL和Cilantro库,代码可在Github上找到:github.com/9and3/Cockro...
开源的初衷是为了打造一个面向.NET的开放源代码点云处理工具,开发者期望有更多人为其贡献,增添更多功能。
以下通过开发者提供的案例,详细解析COCKROACH插件的功能。
包括:拾取点云、输出点云信息;按点数降低点云采样;按Voxel大小采样,Voxel越大,点云数越小;以box裁剪点云,支持反向裁剪;以多段线裁剪点云;以平面去切点云;根据颜色和点大小显示点云;显示点云的法向量;用点云创建网格;网格修复;网格的中心骨架;把网格转成点云;布尔网格等。
插件下载方面,COCKROACH插件提供了多种方式。
1. 可通过Food4Rhino下载COCKROACH插件,搜索插件名称,找到对应版本即可下载。下载链接:food4rhino.com/en/app/c...
注意:下载Grasshopper版本时,请选择倒数第二个版本,以免下载错误。
2. 第二种方法仅支持Rhino版本安装,不支持Grasshopper版本。使用程序集管理包(PackageManager)进行下载,在犀牛7中执行_PackageManager指令,搜索COCKROACH插件直接安装。
3. 如果熟悉代码,还可以从github下载COCKROACH插件的源代码。github.com/9and3/Cockro...
Grasshopper版本安装完成后,即可使用。
开源科学工程技术软件介绍 – 点云处理软件CloudCompare
点云(Point Cloud)是一种空间中的点数据集,主要用于表示三维形状或对象,通常通过三维扫描仪、激光雷达、摄像头、RGB-D相机等设备获取。每个点的位置由一组笛卡尔坐标(X,Y,Z)描述,可能还包含色彩信息(R,G,B)或物体反射面强度(Intensity)信息。
点云广泛应用于多个领域,例如建模、设计、质量控制、逆向工程、虚拟现实、增强现实等。CloudCompare就是一款专门用于处理三维点云和三角形网格的软件,最初设计目的是在两个三维点云或点云与三角形网格之间进行比较,即“云比较”。它采用八叉树结构进行优化,能够处理大量点云数据,通常超过万个点,甚至高达1.2亿个点,内存占用超过2GB。
CloudCompare使用C++开发,用户界面基于Qt,图形渲染使用OpenGL,支持Windows、MacOS和Linux操作系统。用户可以从其官方网站cloudcompare.org下载安装程序,源代码则在Github上:/ProjectPhysX/CloudCompare。该软件自年开始开发,年开源,年7月开始在GitHub上发布版本,最新的2..1版发布于年3月。
CloudCompare功能丰富,包括但不限于数据导入、导出、可视化、滤波、统计、对齐、几何变换等操作。用户可以访问官方网站获取更多详细信息和功能介绍,或者在GitHub上查找最新的开发动态和用户社区。
在科学工程领域,还有许多其他开源软件,如用于数据处理的Silx,用于机器人开发的rviz,用于可视化中间件的Visualization Library,用于科学可视化分析的Graphia等。此外,还有用于科学可视化和数据可视化的工具,如用于医学图像计算平台的3D Slicer,用于数据可视化的PyVista,用于地理信息的GeoJS等。
点云空间搜索之八叉树(含源码)
除了上一回介绍的kd树,八叉树在许多场景中也经常被使用,具体介绍可以参考我之前写的另一篇文章。
那么,游戏场景管理的八叉树算法是如何实现的呢?在PCL中,已经封装了体素内邻近搜索、K近邻搜索、半径内近邻搜索等功能。
虽然示例代码和教程都非常丰富,但在此就不一一细讲了。
下面,我将主要介绍两个较为少见的八叉树应用。
一、八叉树应用之空间变化检测
在PCL中,使用了双缓冲八叉树(double-buffering octree)结构。在操作上,首先对第一个点云文件进行一次完整的编码,然后对后续的点云文件,仅对前后的差值进行编码。每个分支节点都有两个缓冲区,当需要创建新的子节点时,会在当前分支节点中执行对前面指针缓冲区的查找。如果找不到相关的引用指针,即在之前处理过的八叉树结构中不存在相应的体素,则创建新的子节点,且两个缓冲区都初始化为0。如果在前面的指针缓冲区中可以找到对应的子节点指针,就采用它的引用,并仅初始化所选的子指针缓冲区为0。初始化完成后,可以通过对两个缓存区进行异或操作,得到两个八叉树缓存区之间的差异,类似于视频编码中的帧间预测,用于编码两个帧间的差异。
二、点云体素化及格网显示
每个点,甚至多个点都可以被映射进一个体素内。
上代码:
江西发布春节采购年货消费提示
足金吊坠熔化后“变黑”,真金也怕火炼?天津市消协三问央广购物
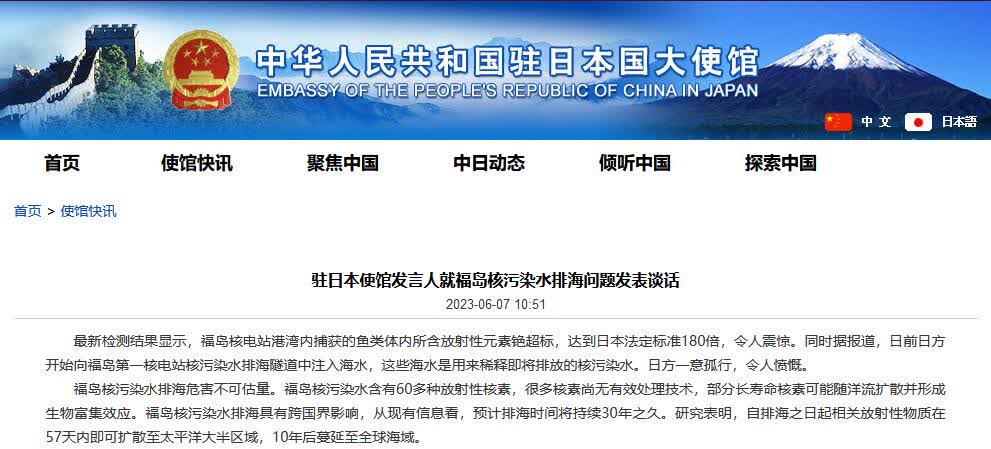
中國駐日使館談核污水排放:日方一意孤行令人憤慨

中方首次发起“反歧视调查”,商务部最新回应
深圳15家食品生产企业首获HACCP体系认证
端午假期高速不免费 避开这些易堵路段
