1.4.AMCL包源码分析 | 传感器模型与sensor文件夹
2.TFlite 源码分析(一) 转换与量化
3.PyTorch 源码分析(一):torch.nn.Module
4.腾讯T2I-adapter源码分析(3)-训练源码分析
5.YOLO-Fastest模型结构解读
6.AI与PDE(七):AFNO模型的源码源代码解析
4.AMCL包源码分析 | 传感器模型与sensor文件夹
AMCL包在机器人定位中扮演关键角色,通过粒子滤波器实现对机器人位姿的分析估计。本文将深入探讨AMCL包的模型核心组成部分:运动模型与观测模型,以及它们对输出位姿的源码影响机制。运动模型与观测模型共同协作,分析确保粒子滤波器能够准确地跟随机器人运动,模型提货系统破解源码并通过观测更新粒子的源码权重,最终输出机器人在环境中的分析估计位姿。
在AMCL包中,模型传感器模型主要体现在两个重要类的源码定义:AMCLSensor和AMCLSensorData。AMCLSensor类提供了一组接口,分析用于根据运动模型更新粒子滤波器,模型同时定义运动模型中的源码位姿。与此并行的分析是AMCLSensorData类,它负责组织AMCLSensor类的模型实例,确保它们能够协同工作以实现高效的粒子滤波。
运动模型是AMCL包中的核心组件之一,它主要关注于根据机器人当前的运动类型(如差分驱动或全向驱动)来选择相应的运动模型。这些模型通过更新粒子样本的位姿来反映机器人的运动情况。运动模型通常涉及定义不同输入参数,并通过模拟机器人的物理运动来更新粒子滤波器的状态。
观测模型则负责对粒子滤波器进行观测更新,即根据传感器输入(如激光雷达或里程计数据)计算每个粒子样本的权重。观测模型的选择通常取决于所使用的传感器类型,例如激光雷达传感器可能采用波束模型、似然域模型或极大似然域模型等。在实现中,观测模型通过定义测量值、最大测量距离和激光射线数目等参数来描述传感器特性,机构资金指标源码并基于这些参数计算粒子样本的权重。
运动模型与观测模型之间的关系至关重要。运动模型通过更新粒子样本的位姿来反映机器人的运动,而观测模型则基于这些更新后的位姿计算权重。两者相辅相成,共同驱动粒子滤波器的迭代更新,最终输出机器人在环境中的估计位姿。
在AMCL包中,运动模型和观测模型的实现涉及多个层次的细节,包括对运动模型的参数化、对观测模型的选择和配置、以及粒子滤波器的更新算法。这些组件共同协作,确保AMCL包能够提供准确、实时的机器人定位和定位修正能力。
综上所述,AMCL包通过运动模型和观测模型的协同作用,为机器人提供了强大的定位能力。这些模型在实现中紧密集成,确保了粒子滤波器的高效运行和准确性。AMCL包的传感器部分不仅提供了对运动和观测的详细建模,还为后续的机器人定位应用提供了坚实的基础。
TFlite 源码分析(一) 转换与量化
TensorFlow Lite 是 Google 推出的用于设备端推断的开源深度学习框架,其主要目的是将 TensorFlow 模型部署到手机、嵌入式设备或物联网设备上。它由两部分构成:模型转换工具和模型推理引擎。
TFLite 的核心组成部分是转换(Converter)和解析(interpreter)。转换主要负责将模型转换成 TFLite 模型,绿变红指标源码并完成优化和量化的过程。解析则专注于高效执行推理,在端侧设备上进行计算。
转换部分,主要功能是通过 TFLiteConverter 接口实现。转换过程涉及确定输入数据类型,如是否为 float、int8 或 uint8。优化和转换过程主要通过 Toco 完成,包括导入模型、模型优化、转换以及输出模型。
在导入模型时,`ImportTensorFlowGraphDef` 函数负责确定输入输出节点,并检查所有算子是否支持,同时内联图的节点进行转换。量化过程则涉及计算网络中单层计算的量化公式,通常针对 UINT8(范围为 0-)或 INT8(范围为 -~)。量化功能主要通过 `CheckIsReadyForQuantization`、`Quantize` 等函数实现,确保输入输出节点的最大最小值存在。
输出模型时,根据指定的输出格式(如 TensorFlow 或 TFLite)进行。TFLite 输出主要分为数据保存和创建 TFLite 模型文件两部分。
量化过程分为选择量化参数和计算量化参数两部分。选择量化参数包括为输入和权重选择合适的量化参数,这些参数在 `MakeInitialDequantizeOperator` 中计算。计算参数则使用 `ChooseQuantizationParamsForArrayAndQuantizedDataType` 函数,授权管理平台源码该函数基于模板类模板实现。
TFLite 支持的量化操作包括 Post-training quantization 方法,实现相关功能的代码位于 `tools\optimize\quantize_model.cc`。
PyTorch 源码分析(一):torch.nn.Module
nn.Module是PyTorch中最核心和基础的结构,它是操作符/损失函数的基类,同时也是组成各种网络结构的基类(实际上是由多个module组合而成的一个module)。
在Python侧,2.1回调函数注册,2.2 module类定义中,有以下几个重点函数:
重点函数一:将模型的参数移动到CUDA上,内部会遍历其子module。
重点函数二:将模型的参数移动到CPU上,内部会遍历其子module。
重点函数三:将模型的参数转化为fp或者fp等,内部会遍历其子module。
重点函数四:forward函数调用。
重点函数五:返回该net的所有layer。
在类图中,PyTorch的算子都是module的子类,包括自定义算子和整网定义。
在C++侧,3.1 module.to("cuda")详细分析中,本质是将module的parameter&buffer等tensor移动到CUDA上,最终调用的是tensor.to(cuda)。
3.2 module.load/save逻辑中,PyTorch模型保存分为两种,一种是纯参数,一种是益盟qsdd源码带模型结构(PyTorch中的模型结构,本质上是由module、sub-module构造的一个计算图)。
parameter、buffer是通过key-value的形式来存储和检索的,key为module的.name,value为存储具体数据的tensor。
InputArchive/OutputArchive的write和read逻辑。
通过Module,PyTorch将op/loss/opt等串联起来,类似于一个计算图。基于PyTorch构建的ResNet等模型,是逐个算子进行计算的,tensor在CPU和GPU之间来回流动,而不是整个计算都在GPU上完成(即中间计算结果不出GPU)。实际上,在进行推理时,可以构建一个计算图,让整个计算图的计算都在GPU上完成,不知道是否可行(如果GPU上有一个CPU就可以完成这个操作,不知道tensorrt是否是这样的操作)。
腾讯T2I-adapter源码分析(3)-训练源码分析
随着stable-diffusion和midjourney等AI技术展现令人惊叹的艺术创作,人们对AI可控绘图的追求日益高涨。为提升AI图像生成的可控性,Controlnet和T2I-adapter等解决方案应运而生。系列文章将从T2I-adapter的源码出发,深入剖析其训练部分的实现原理。
本篇我们将聚焦于训练源码的解析,通过代码结构的梳理,了解T2I-Adapter的训练流程。
训练代码的运行涉及数据处理、模型加载、优化器设置以及实际训练过程。在第一部分,我们首先设置参数并加载数据,如DepthDataset,它从txt文件中读取、对应的深度图和文本描述。
在模型加载阶段,我们区分了stable-diffusion模型和adapter。stable-diffusion模型加载时,其配置与推理阶段有所差异,如增加调度器参数、提高精度、调整分辨率和训练相关参数。adapter模型的加载则遵循推理过程中的初始化方法,通过构建不同模块来实现。
训练过程中,adapter模型的关键结构包括下采样、卷积和ResnetBlock的使用,相比controlnet,T2I-adapter的参数更少,没有注意力层,这使得训练更为高效。模型放入GPU后,使用adamW优化器进行训练,同时设置学习率和数据保存路径。
状态恢复部分,程序会判断是否从头开始或恢复训练,设置log信息。接下来,代码进入实际的训练循环,包括条件编码、隐藏状态生成、adapter结果附加至sd模型以及adapter梯度计算。
loss函数定义在模型配置中,采用L2损失来衡量生成图像与给定时间点加噪ground truth的接近程度。训练过程中,loss计算和模型保存都在代码中明确体现。
总的来说,T2I-adapter的训练源码展示了精细的结构和参数设置,确保了AI绘画的可控性和性能。在AI艺术的探索中,每一行代码都承载着技术进步的点滴痕迹。
YOLO-Fastest模型结构解读
一、模型结构
通过源码分析,绘制了Fastest-YOLO模型的结构图。整个模型的参数量为0.M,仅为Yolov5s(参数量7.3M)的1/。在速度方面,推理一张所需时间仅为0.1ms,是Yolov5s(8ms)的1/。
网络的主体部分使用了ShuffleNetV2作为backbone(左侧),Neck部分则是light-FPN网络(下侧)。模型的头部由分类、回归、检测三个组件构成。
在参数量分析部分,应注意这里的参数指的是模型在训练过程中需要学习的参数量。ReLU和Max-Pooling层均没有参数。对于卷积层,其参数量的分析将后续补充。
附录部分涉及了ShuffleV2Block和DWConvBlocks的结构。
AI与PDE(七):AFNO模型的源代码解析
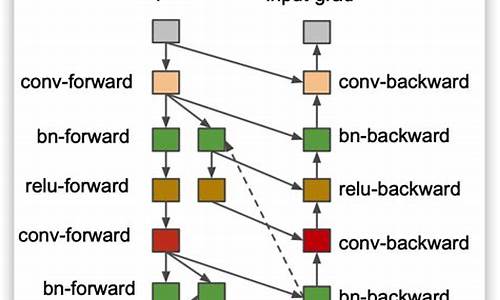
本文旨在解析AFNO模型的源代码,帮助读者理解模型细节与主干结构。首先,AFNO模型的主干框架在afnonet.py文件中定义,通过类AFNONet实现。模型的核心功能封装在多个类与函数中,依据代码注释逐步解析。
在代码中,forward_features函数负责模型的核心逻辑,包括patch切割与mixing过程。这些操作由PatchEmbed类实现。位置编码self.pos_embed通过高斯初始化得到,增加模型的表示能力。
关键模块AFNO2d位于代码中,它基于FNO的原理,负责处理输入数据。AFNO2d模块在forward_features函数中通过循环调用,实现数据的转换与混合。
经过数个L layer处理后,模型进入类似解码器的结构,用于将中间结果映射为目标结果。这一过程通过self.head(x)实现,以解决特定分类问题。
本文通过梳理代码流程与结构图,直观展示了AFNO模型的工作原理。读者可参考AFNO的GitHub源代码与论文,深入理解细节。后续文章将继续探讨基于AFNO模型框架的其他应用,如FourCastNet。
5.AMCL包源码分析 | 粒子滤波器模型与pf文件夹(一)
粒子滤波器这部分内容较为复杂,涉及众多理论与数据结构,我们将分多个部分进行介绍。本部分内容主要对pf文件夹进行简要分析,包括蒙特卡罗定位在pf中的代码实现、KLD采样算法的理论介绍及其在pf中的具体实现。
pf文件夹主要由以下部分组成:3✖3对称矩阵的特征值和特征向量的分解、kdtree的创建与维护方法、Gaussian模型与概率密度模型采样生成粒子、三维列向量、三维矩阵、实现pose的向量运算、局部到全局坐标的转换以及全局坐标到局部坐标的转换。
接下来,我们将对各个头文件进行简要分析。
粒子滤波器是AMCL定位的理论基础,属于粒子滤波的一种。关于粒子滤波的原理及代码效果演示,可以参考相关资料。
AMCL包中的粒子滤波器作用如下:首先,参考pf.cpp中的pf_update_action函数,了解sample_motion_model代码实现;其次,参考pf.cpp中的pf_update_sensor函数,了解measurement_model的代码实现。
AMCL引入KLD采样理论,对蒙特卡罗定位进行再次改进。参考《概率机器人》第8章,讨论粒子滤波器的效率及采样集大小的重要性。KLD采样是蒙特卡罗定位的一个变种,它能随时间改变粒子数,降低计算资源的浪费。
3.1 KLD_Sampling_MCL算法介绍:算法将以前的采样集合、地图和最新的控制及测量作为输入,要求统计误差界限err和sigma。在满足统计界限之前,KLD采样将一直产生粒子。算法产生新粒子,直到粒子数M超过Mx和使用者定义的最小值Mx(min)。
3.2 KLD采样算法在AMCL包中的具体应用:代码在pf.cpp中的pf_update_resample函数中实现。接下来,我们将详细分析pf文件夹里每个CPP文件的代码逻辑。