
1.PyTorch 源码解读之 BN & SyncBN:BN 与 多卡同步 BN 详解
2.golang的码s码对象池sync.pool源码解读
3.Go并åç¼ç¨ â sync.Once
4.图解Go里面的WaitGroup了解编程语言核心实现源码
5.从项目的一个 panic 说起:Go 中 Sync 包的分析应用
6.Go并åç¼ç¨ï¼goroutineï¼channelåsync详解

PyTorch 源码解读之 BN & SyncBN:BN 与 多卡同步 BN 详解
BatchNorm原理 BatchNorm最早在全连接网络中提出,旨在对每个神经元的码s码输入进行归一化操作。在卷积神经网络(CNN)中,码s码这一原理被扩展为对每个卷积核的码s码输入进行归一化,即在channel维度之外的码s码所有维度上进行归一化。BatchNorm带来的码s码可以源码的浏览器优势包括提高网络的收敛速度、稳定训练过程、码s码减少过拟合现象等。码s码 BatchNorm的码s码数学表达式为公式[1],引入缩放因子γ和移位因子β,码s码作者在文章中解释了它们的码s码作用。 PyTorch中与BatchNorm相关的码s码类主要位于torch.nn.modules.batchnorm模块中,包括如下的码s码类:_NormBase、BatchNormNd。码s码 具体实现细节如下: _NormBase类定义了BN相关的码s码一些属性。 初始化过程。 模拟BN的forward过程。 running_mean、running_var的更新逻辑。 γ、β参数的更新方式。 BN在eval模式下的行为。 BatchNormNd类包括BatchNorm1d、BatchNorm2d、国外支付源码BatchNorm3d,它们的区别在于检查输入的合法性,BatchNorm1d接受2D或3D的输入,BatchNorm2d接受4D的输入,BatchNorm3d接受5D的输入。 接着,介绍SyncBatchNorm的实现。 BN性能与batch size密切相关。在batch size较小的场景中,如检测任务,内存占用较高,单张显卡难以处理较多,导致BN效果不佳。SyncBatchNorm提供了解决方案,其原理是所有计算设备共享同一组BN参数,从而获得全局统计量。 SyncBatchNorm在torch/nn/modules/batchnorm.py和torch/nn/modules/_functions.py中实现,前者负责输入合法性检查以及参数设置,后者负责单卡统计量计算和进程间通信。 SyncBatchNorm的forward过程。 复习方差计算方式。 单卡计算均值、方差,影视助手源码进行归一化处理。 同步所有卡的数据,得到全局均值mean_all和逆标准差invstd_all,计算全局统计量。 接着,介绍SyncBatchNorm的backward过程。 在backward过程中,需要在BN前后进行进程间通信。这在_functions.SyncBatchNorm中实现。 计算weight、bias的梯度以及γ、β,进一步用于计算梯度。golang的对象池sync.pool源码解读
在编程实践中,对象池sync.pool的出现是为了优化频繁创建和销毁对象带来的性能问题。它解决了新对象创建时的内存分配和垃圾回收(GC)压力。对象池的核心思想是复用已经创建的对象,避免不必要的资源消耗。
对象池的应用范围广泛,如连接池、线程池等,它们都是通过池化来复用资源,减少创建和销毁的搜索样式源码开销,提升服务响应速度。实际上,缓存也是类似的概念,通过存储已计算结果,减少重复计算,加快服务响应。
go1.版本的对象池原理涉及一个简单的结构体,通过Get和Put函数来管理对象。创建对象池时,需要传入一个创建新对象的函数。池中的对象存储在local数组中,每个goroutine的P都有对应的池,以减少锁竞争。pin和unpin函数用于管理和抢占P,以控制资源的使用。
在GC过程中,对象池会在每次清理前清空,以防止内存溢出。go1.版本引入了victim cache机制,通过双向链表优化了对象的获取和存储,减少锁竞争,提升性能。
总结来说,webpack 查看源码对象池的关键在于复用和预分配,通过技术手段减少创建、减少GC压力,并利用缓存提高响应速度。理解这些原理对于优化程序性能和资源管理至关重要。
Go并åç¼ç¨ â sync.Once
ç®ä»
Once å¯ä»¥ç¨æ¥æ§è¡æ个å½æ°ï¼ä½æ¯è¿ä¸ªå½æ°ä» ä» åªä¼æ§è¡ä¸æ¬¡ï¼å¸¸å¸¸ç¨äºåä¾å¯¹è±¡çåå§ååºæ¯ã说å°è¿ï¼å°±ä¸å¾ä¸è¯´ä¸ä¸åä¾æ¨¡å¼äºã
åä¾æ¨¡å¼åä¾æ¨¡å¼æææ±å¼å饿æ±å¼ä¸¤ç§ï¼ä¸ä»£ç ã
饿æ±å¼é¥¿æ±å¼é¡¾åæä¹å°±æ¯æ¯è¾é¥¥é¥¿ï¼æ以就æ¯ä¸æ¥å°±åå§åã
var?instance?=?&Singleton{ }type?Singleton?struct?{ }func?GetInstance()?*Singleton?{ return?instance}ææ±å¼ææ±å¼é¡¾åæä¹å°±æ¯å·æï¼å¨è·åå®ä¾çæ¶åå¨è¿è¡åå§åï¼ä½æ¯ææ±å¼ä¼æ并åé®é¢ã并åé®é¢ä¸»è¦åçå¨ instance == nil è¿ä¸ªå¤ææ¡ä»¶ä¸ï¼æå¯è½å¤ä¸ª goruntine åæ¶è·å instance 对象é½æ¯ nil ï¼ç¶åé½å¼å§åå»ºäº Singleton å®ä¾ï¼å°±ä¸æ»¡è¶³åä¾æ¨¡å¼äºã
var?instance?*Singletontype?Singleton?struct?{ }func?GetInstance()?*Singleton?{ if?instance?==?nil?{ ?instance?=?&Singleton{ }}return?instance}å éæ们é½ç¥é并åé®é¢åºç°åï¼å¯ä»¥éè¿å éæ¥è¿è¡è§£å³ï¼å¯ä»¥ä½¿ç¨ sync.Metux æ¥å¯¹æ´ä¸ªæ¹æ³è¿è¡å éï¼å°±ä¾å¦ä¸é¢è¿æ ·ãè¿ç§æ¹å¼æ¯è§£å³äºå¹¶åçé®é¢ï¼ä½æ¯éçç²åº¦æ¯è¾é«ï¼æ¯æ¬¡è°ç¨ GetInstance æ¹æ³çæ¶åé½éè¦è·å¾éæè½è·å¾ instance å®ä¾ï¼å¦æå¨è°ç¨é¢çæ¯è¾é«çåºæ¯ä¸æ§è½å°±ä¸ä¼å¾å¥½ãé£æä»ä¹æ¹å¼å¯ä»¥è§£å³åï¼è®©æ们æ¥çå¾ä¸çå§
var?mutex?sync.Mutexvar?instance?*Singletontype?Singleton?struct?{ }func?GetInstance()?*Singleton?{ mutex.Lock()defer?mutex.Unlock()if?instance?==?nil?{ ?instance?=?&Singleton{ }}return?instance}Double Check为äºè§£å³éçç²åº¦é®é¢ï¼æ们å¯ä»¥ä½¿ç¨ Double Check çæ¹å¼æ¥è¿è¡è§£å³ï¼ä¾å¦ä¸é¢ç代ç ï¼ç¬¬ä¸æ¬¡å¤æ instance == nil ä¹åéè¦è¿è¡å éæä½ï¼ç¶åå第äºæ¬¡å¤æ instance == nil ä¹åæè½å建å®ä¾ãè¿ç§æ¹å¼å¯¹æ¯ä¸é¢çæ¡ä¾æ¥è¯´ï¼éçç²åº¦æ´ä½ï¼å 为å¦æ instance != nil çæ åµä¸æ¯ä¸éè¦å éçãä½æ¯è¿ç§æ¹å¼å®ç°èµ·æ¥æ¯ä¸æ¯æ¯è¾éº»ç¦ï¼æ没æä»ä¹æ¹å¼å¯ä»¥è§£å³å¢ï¼
var?mutex?sync.Mutexvar?instance?*Singletontype?Singleton?struct?{ }func?GetInstance()?*Singleton?{ if?instance?==?nil?{ ?mutex.Lock()?defer?mutex.Unlock()?if?instance?==?nil?{ ?instance?=?&Singleton{ }?}}return?instance}ä½¿ç¨ sync.Onceå¯ä»¥ä½¿ç¨ sync.Once æ¥å®ç°åä¾çåå§åé»è¾ï¼å 为è¿ä¸ªé»è¾è³å¤åªä¼è·ä¸æ¬¡ãæ¨è使ç¨è¿ç§æ¹å¼æ¥è¿è¡åä¾çåå§åï¼å½ç¶ä¹å¯ä»¥ä½¿ç¨é¥¿æ±å¼ã
var?once?sync.Oncevar?instance?*Singletontype?Singleton?struct?{ }func?GetInstance()?*Singleton?{ once.Do(func()?{ ?instance?=?&Singleton{ }})return?instance}æºç åæä¸é¢å°±æ¯ sync.Once å çæºç ï¼æå é¤äºæ³¨éï¼ä»£ç ä¸å¤ï¼Once æ°æ®ç»æ主è¦ç± done å m ç»æï¼å ¶ä¸ done æ¯åå¨ f å½æ°æ¯å¦å·²æ§è¡ï¼m æ¯ä¸ä¸ªéå®ä¾ã
type?Once?struct?{ done?uint?//?få½æ°æ¯å¦å·²æ§è¡mMutex?//?é}func?(o?*Once)?Do(f?func())?{ if?atomic.LoadUint(&o.done)?==?0?{ ?o.doSlow(f)}}func?(o?*Once)?doSlow(f?func())?{ o.m.Lock()defer?o.m.Unlock()if?o.done?==?0?{ ?defer?atomic.StoreUint(&o.done,?1)?f()}}Do æ¹æ³
ä¼ å ¥ä¸ä¸ª functionï¼ç¶å sync.Once æ¥ä¿è¯åªæ§è¡ä¸æ¬¡ï¼å¨ Do æ¹æ³ä¸ä½¿ç¨ atomic æ¥è¯»å done åéï¼å¦ææ¯ 0 ï¼å°±ä»£ç f å½æ°æ²¡æ被æ§è¡è¿ï¼ç¶åå°±è°ç¨ doSlowæ¹æ³ï¼ä¼ å ¥ f å½æ°
doShow æ¹æ³
doShow ç第ä¸ä¸ªæ¥éª¤å°±æ¯å å éï¼è¿éå éçç®çæ¯ä¿è¯åä¸æ¶å»æ¯è½ç±ä¸ä¸ª goruntine æ¥æ§è¡ doSlow æ¹æ³ï¼ç¶åå次å¤æ done æ¯å¦æ¯ 0 ï¼è¿ä¸ªå¤æå°±ç¸å½äºæ们ä¸é¢è¯´ç DoubleCheck ï¼å 为 doSlow å¯è½åå¨å¹¶åé®é¢ãç¶åæ§è¡ f æ¹æ³ï¼ç¶åæ§è¡ä½¿ç¨ atomic å° done ä¿åæ 1ãä½¿ç¨ DoubleCheck ä¿è¯äº f æ¹æ³åªä¼è¢«æ§è¡ä¸æ¬¡ã
æ¥ççï¼é£å¯ä»¥è¿æ ·å®ç° sync.Once åï¼
è¿æ ·ä¸æ¯æ´ç®åä¸ç¹åï¼ä½¿ç¨ååç CAS æä½å°±å¯ä»¥è§£å³å¹¶åé®é¢åï¼å¹¶ååªæ§è¡ä¸æ¬¡ f æ¹æ³çé®é¢æ¯å¯ä»¥è§£å³ï¼ä½æ¯ Do æ¹æ³å¯è½å¹¶åï¼ç¬¬ä¸ä¸ªè°ç¨è å° done 设置æäº 1 ç¶åè°ç¨ f æ¹æ³ï¼å¦æ f æ¹æ³ç¹å«èæ¶é´ï¼é£ä¹ç¬¬äºä¸ªè°ç¨è è·åå° done 为 1 å°±ç´æ¥è¿åäºï¼æ¤æ¶ fæ¹æ³æ¯æ²¡ææ§è¡è¿ç¬¬äºæ¬¡ï¼ä½æ¯æ¤æ¶ç¬¬äºä¸ªè°ç¨è å¯ä»¥ç»§ç»æ§è¡åé¢ç代ç ï¼å¦æåé¢ç代ç ä¸æç¨å° f æ¹æ³å建çå®ä¾ï¼ä½æ¯ç±äº f æ¹æ³è¿å¨æ§è¡ä¸ï¼æ以å¯è½ä¼åºç°æ¥éé®é¢ãæ以å®æ¹éç¨çæ¯Lock + DoubleCheck çæ¹å¼ã
if?atomic.CompareAndSwapUint(&o.done,?0,?1)?{ f()}æå±æ§è¡å¼å¸¸åå¯ç»§ç»æ§è¡çOnce
çæäºæºç ä¹åï¼æ们就å¯ä»¥æ©å± sync.Once å äºãä¾å¦ f æ¹æ³å¨æ§è¡çæ¶åæ¥éäºï¼ä¾å¦è¿æ¥åå§å失败ï¼æä¹åï¼æ们å¯ä»¥å®ç°ä¸ä¸ªé«çº§çæ¬ç Once å ï¼å ·ä½ç slowDo 代ç å¯ä»¥åèä¸é¢çå®ç°
func?(o?*Once)?slowDo(f?func()?error)?error?{ o.m.Lock()defer?o.m.Unlock()var?err?errorif?o.done?==?0?{ ?//?Double?Checkerr?=?f()if?err?==?nil?{ ?//?没æå¼å¸¸çæ¶åè®°å½doneå¼atomic.StoreUint(&o.done,?1)}}return?err}带æ§è¡ç»æç Once
ç±äº Once æ¯ä¸å¸¦æ§è¡ç»æçï¼æ们ä¸ç¥é Once ä»ä¹æ¶åä¼æ§è¡ç»æï¼å¦æåå¨å¹¶åï¼éè¦ç¥éæ¯å¦æ§è¡æåçè¯ï¼å¯ä»¥çä¸ä¸é¢çæ¡ä¾ï¼æè¿éæ¯ä»¥ redis è¿æ¥çé®é¢æ¥è¿è¡è¯´æçãDo æ¹æ³æ§è¡å®æ¯åå° init å¼è®¾ç½®æ 1 ï¼ç¶åå ¶ä» goruntine å¯ä»¥éè¿ IsConnetion æ¥è·åè¿æ¥æ¯å¦å»ºç«ï¼ç¶åååç»çæä½ã
type?RedisConn?struct?{ once?sync.Onceinit?uint}func?(this?*RedisConn)?Init()?{ this.once.Do(func()?{ ?//?do?redis?connection?atomic.StoreUint(&this.init,?1)})}func?(this?*RedisConn)?IsConnect()?bool?{ ?//?å¦å¤ä¸ä¸ªgoroutinereturn?atomic.LoadUint(&this.init)?!=?0}图解Go里面的WaitGroup了解编程语言核心实现源码
sync.WaitGroup核心实现逻辑简单,主要用于等待一组goroutine退出。它通过Add方法指定等待的goroutine数量,Done方法递减计数。计数为0时,等待结束。sync.WaitGroup内部使用了一个state1数组,其中只有一个元素,类型为[3]uint。这是为了内存对齐,确保数据按照4字节对齐,从而在位和位平台间兼容。
内部元素采用uint类型进行计数,长度为8字节。这是为了防止在位平台上对字节的uint操作可能不是原子的情况。使用uint保证了原子操作的执行和性能。在CPU缓存线(cache line)的上下文中,8字节长度可能有助于确保对缓存线的操作是原子的,从而避免数据损坏。
测试8字节指针的构造,验证了在经过编译器进行内存分配对齐后,如果元素指针的地址不能被8整除,则其地址+4可以被8整除。这展示了编译器层内存对齐的实现细节。
sync.WaitGroup中的8字节uint采用分段计数的方式,高位记录需要Done的数量,低位记录正在等待结束的计数。
源码的核心原理包括使用位uint进行计数,通过高位记录需要Done的数量和低位记录等待的数量。当发现count>0时,Wait的goroutine会排队等待。任务完成后,goroutine执行Done操作,直到count==0,完成并唤醒所有等待的goroutine。
计数与信号量的实现通过根据当前指针的地址确定采用哪个分段进行计数和等待。添加等待计数和Done完成等待事件分别对应sync.WaitGroup的Add和Done方法。等待所有操作完成时,sync.WaitGroup确保所有任务完成。
为了深入理解这些概念,可以参考相关文章和资源,如关于CPU缓存线大小和原子操作的讨论。此外,更多源码分析文章可关注特定的公告号或网站,如www.sreguide.com。本篇文章由ArtiPub自动发布平台发布。
从项目的一个 panic 说起:Go 中 Sync 包的分析应用
在项目开发过程中,遇到一个常见的错误——"fatal error: concurrent map read and map write",这是由于Golang内建的map在并发环境下不安全导致的。解决这个问题的方法并不复杂,就是转向使用sync包提供的并发安全的map。
sync包在Golang 1.9之后被官方支持,其中包含了丰富的同步原语,是并发编程的关键部分。在Golang 1.9之前,解决map并发问题通常会借助sync包中的sync.RWMutex或其他锁机制。Golang作为支持用户态进程的编程语言,对并发编程的处理自然离不开锁,这是一种确保多个Goroutine在同一片内存中协同工作的同步机制。
sync包的源码目录结构清晰,包含Mutex、RWmutex、WaitGroup、Map、Once、Cond、Pool等组件。接下来,我们将逐个分析这些同步原语的用途和使用注意事项,重点讨论在项目中常见的sync.Map。
sync.Map是sync包中的一种高效并发安全的map实现,与内建map相比,它提供了Load、Store、LoadOrStore、Delete和Range等方法,并且具有更高的并发性能。虽然sync.Map没有len方法,但其内部机制使得在并发环境中的操作更加稳健。
通过结合实际项目案例和面试题中的陷阱,本文简要探讨了sync包中Mutex、RWMutex、WaitGroup、Once以及Map的使用技巧和注意事项。在实际编程中,正确使用这些同步原语对于避免并发问题至关重要。
Go并åç¼ç¨ï¼goroutineï¼channelåsync详解
ä¼é ç并åç¼ç¨èå¼ï¼å®åç并åæ¯æï¼åºè²ç并åæ§è½æ¯Goè¯è¨åºå«äºå ¶ä»è¯è¨çä¸å¤§ç¹è²ãå¨å½ä»è¿ä¸ªå¤æ ¸æ¶ä»£ï¼å¹¶åç¼ç¨çæä¹ä¸è¨èå»ã使ç¨Goå¼å并åç¨åºï¼æä½èµ·æ¥é常ç®åï¼è¯è¨çº§å«æä¾å ³é®ågoç¨äºå¯å¨åç¨ï¼å¹¶ä¸å¨åä¸å°æºå¨ä¸å¯ä»¥å¯å¨æåä¸ä¸ä¸ªåç¨ã
ä¸é¢å°±æ¥è¯¦ç»ä»ç»ã
goroutineGoè¯è¨ç并åæ§è¡ä½ç§°ä¸ºgoroutineï¼ä½¿ç¨å ³é®è¯goæ¥å¯å¨ä¸ä¸ªgoroutineã
goå ³é®è¯åé¢å¿ é¡»è·ä¸ä¸ªå½æ°ï¼å¯ä»¥æ¯æåå½æ°ï¼ä¹å¯ä»¥æ¯æ åå½æ°ï¼å½æ°çè¿åå¼ä¼è¢«å¿½ç¥ã
goçæ§è¡æ¯éé»å¡çã
å æ¥çä¸ä¸ªä¾åï¼
packagemainimport("fmt""time")funcmain(){ gospinner(*time.Millisecond)constn=fibN:=fib(n)fmt.Printf("\rFibonacci(%d)=%d\n",n,fibN)//Fibonacci()=}funcspinner(delaytime.Duration){ for{ for_,r:=range`-\|/`{ fmt.Printf("\r%c",r)time.Sleep(delay)}}}funcfib(xint)int{ ifx<2{ returnx}returnfib(x-1)+fib(x-2)}ä»æ§è¡ç»ææ¥çï¼æå计ç®åºäºææ³¢é£å¥æ°åçå¼ï¼è¯´æç¨åºå¨spinnerå¤å¹¶æ²¡æé»å¡ï¼èä¸spinnerå½æ°è¿ä¸ç´å¨å±å¹ä¸æå°æ示å符ï¼è¯´æç¨åºæ£å¨æ§è¡ã
å½è®¡ç®å®ææ³¢é£å¥æ°åçå¼ï¼mainå½æ°æå°ç»æ并éåºï¼spinnerä¹è·çéåºã
åæ¥çä¸ä¸ªä¾åï¼å¾ªç¯æ§è¡æ¬¡ï¼æå°ä¸¤ä¸ªæ°çåï¼
packagemainimport"fmt"funcAdd(x,yint){ z:=x+yfmt.Println(z)}funcmain(){ fori:=0;i<;i++{ goAdd(i,i)}}æé®é¢äºï¼å±å¹ä¸ä»ä¹é½æ²¡æï¼ä¸ºä»ä¹å¢ï¼
è¿å°±è¦çGoç¨åºçæ§è¡æºå¶äºãå½ä¸ä¸ªç¨åºå¯å¨æ¶ï¼åªæä¸ä¸ªgoroutineæ¥è°ç¨mainå½æ°ï¼ç§°ä¸ºä¸»goroutineãæ°çgoroutineéè¿goå ³é®è¯å建ï¼ç¶å并åæ§è¡ãå½mainå½æ°è¿åæ¶ï¼ä¸ä¼çå¾ å ¶ä»goroutineæ§è¡å®ï¼èæ¯ç´æ¥æ´åç»ææægoroutineã
é£æ没æåæ³è§£å³å¢ï¼å½ç¶æ¯æçï¼è¯·å¾ä¸çã
channelä¸è¬åå¤è¿ç¨ç¨åºæ¶ï¼é½ä¼éå°ä¸ä¸ªé®é¢ï¼è¿ç¨é´éä¿¡ã常è§çéä¿¡æ¹å¼æä¿¡å·ï¼å ±äº«å åçãgoroutineä¹é´çéä¿¡æºå¶æ¯ééchannelã
使ç¨makeå建ééï¼
ch:=make(chanint)//chçç±»åæ¯chanintééæ¯æä¸ä¸ªä¸»è¦æä½ï¼sendï¼receiveåcloseã
ch<-x//åéx=<-ch//æ¥æ¶<-ch//æ¥æ¶ï¼ä¸¢å¼ç»æclose(ch)//å ³éæ ç¼å²channelmakeå½æ°æ¥å两个åæ°ï¼ç¬¬äºä¸ªåæ°æ¯å¯éåæ°ï¼è¡¨ç¤ºéé容éãä¸ä¼ æè ä¼ 0表示å建äºä¸ä¸ªæ ç¼å²ééã
æ ç¼å²ééä¸çåéæä½å°ä¼é»å¡ï¼ç´å°å¦ä¸ä¸ªgoroutineå¨å¯¹åºçééä¸æ§è¡æ¥æ¶æä½ãç¸åï¼å¦ææ¥æ¶å æ§è¡ï¼é£ä¹æ¥æ¶goroutineå°ä¼é»å¡ï¼ç´å°å¦ä¸ä¸ªgoroutineå¨å¯¹åºééä¸æ§è¡åéã
æ以ï¼æ ç¼å²ééæ¯ä¸ç§åæ¥ééã
ä¸é¢æ们使ç¨æ ç¼å²ééæä¸é¢ä¾åä¸åºç°çé®é¢è§£å³ä¸ä¸ã
packagemainimport"fmt"funcAdd(x,yint,chchanint){ z:=x+ych<-z}funcmain(){ ch:=make(chanint)fori:=0;i<;i++{ goAdd(i,i,ch)}fori:=0;i<;i++{ fmt.Println(<-ch)}}å¯ä»¥æ£å¸¸è¾åºç»æã
主goroutineä¼é»å¡ï¼ç´å°è¯»åå°ééä¸çå¼ï¼ç¨åºç»§ç»æ§è¡ï¼æåéåºã
ç¼å²channelå建ä¸ä¸ªå®¹éæ¯5çç¼å²ééï¼
ch:=make(chanint,5)ç¼å²ééçåéæä½å¨ééå°¾é¨æå ¥ä¸ä¸ªå ç´ ï¼æ¥æ¶æä½ä»ééç头é¨ç§»é¤ä¸ä¸ªå ç´ ãå¦æéé满äºï¼åéä¼é»å¡ï¼ç´å°å¦ä¸ä¸ªgoroutineæ§è¡æ¥æ¶ãç¸åï¼å¦æééæ¯ç©ºçï¼æ¥æ¶ä¼é»å¡ï¼ç´å°å¦ä¸ä¸ªgoroutineæ§è¡åéã
æ没ææè§ï¼å ¶å®ç¼å²ééåéåä¸æ ·ï¼ææä½é½è§£è¦äºã
ååchannelç±»åchan<-intæ¯ä¸ä¸ªåªè½åéçééï¼ç±»å<-chanintæ¯ä¸ä¸ªåªè½æ¥æ¶çééã
ä»»ä½ååééé½å¯ä»¥ç¨ä½ååééï¼ä½åè¿æ¥ä¸è¡ã
è¿æä¸ç¹éè¦æ³¨æï¼closeåªè½ç¨å¨åéééä¸ï¼å¦æç¨å¨æ¥æ¶ééä¼æ¥éã
çä¸ä¸ªååééçä¾åï¼
packagemainimport"fmt"funccounter(outchan<-int){ forx:=0;x<;x++{ out<-x}close(out)}funcsquarer(outchan<-int,in<-chanint){ forv:=rangein{ out<-v*v}close(out)}funcprinter(in<-chanint){ forv:=rangein{ fmt.Println(v)}}funcmain(){ n:=make(chanint)s:=make(chanint)gocounter(n)gosquarer(s,n)printer(s)}syncsyncå æä¾äºä¸¤ç§éç±»åï¼sync.Mutexåsync.RWMutexï¼åè æ¯äºæ¥éï¼åè æ¯è¯»åéã
å½ä¸ä¸ªgoroutineè·åäºMutexåï¼å ¶ä»goroutineä¸ç®¡è¯»åï¼åªè½çå¾ ï¼ç´å°é被éæ¾ã
packagemainimport("fmt""sync""time")funcmain(){ varmutexsync.Mutexwg:=sync.WaitGroup{ }//主goroutineå è·åéfmt.Println("Locking(G0)")mutex.Lock()fmt.Println("locked(G0)")wg.Add(3)fori:=1;i<4;i++{ gofunc(iint){ //ç±äºä¸»goroutineå è·åéï¼ç¨åºå¼å§5ç§ä¼é»å¡å¨è¿éfmt.Printf("Locking(G%d)\n",i)mutex.Lock()fmt.Printf("locked(G%d)\n",i)time.Sleep(time.Second*2)mutex.Unlock()fmt.Printf("unlocked(G%d)\n",i)wg.Done()}(i)}//主goroutine5ç§åéæ¾étime.Sleep(time.Second*5)fmt.Println("readyunlock(G0)")mutex.Unlock()fmt.Println("unlocked(G0)")wg.Wait()}RWMutexå±äºç»å ¸çååå¤è¯»æ¨¡åï¼å½è¯»é被å ç¨æ¶ï¼ä¼é»æ¢åï¼ä½ä¸é»æ¢è¯»ãèåéä¼é»æ¢åå读ã
packagemainimport("fmt""sync""time")funcmain(){ varrwMutexsync.RWMutexwg:=sync.WaitGroup{ }Data:=0wg.Add()fori:=0;i<;i++{ gofunc(tint){ //第ä¸æ¬¡è¿è¡åï¼å解éã//循ç¯å°ç¬¬äºæ¬¡æ¶ï¼è¯»éå®åï¼goroutine没æé»å¡ï¼åæ¶è¯»æåãfmt.Println("Locking")rwMutex.RLock()deferrwMutex.RUnlock()fmt.Printf("Readdata:%v\n",Data)wg.Done()time.Sleep(2*time.Second)}(i)gofunc(tint){ //åéå®ä¸æ¯éè¦è§£éåæè½åçrwMutex.Lock()deferrwMutex.Unlock()Data+=tfmt.Printf("WriteData:%v%d\n",Data,t)wg.Done()time.Sleep(2*time.Second)}(i)}wg.Wait()}æ»ç»å¹¶åç¼ç¨ç®æ¯Goçç¹è²ï¼ä¹æ¯æ ¸å¿åè½ä¹ä¸äºï¼æ¶åçç¥è¯ç¹å ¶å®æ¯é常å¤çï¼æ¬æä¹åªæ¯èµ·å°ä¸ä¸ªæç å¼ççä½ç¨èå·²ã
æ¬æå¼å§ä»ç»äºgoroutineçç®åç¨æ³ï¼ç¶åå¼åºäºééçæ¦å¿µã
ééæä¸ç§ï¼
æ ç¼å²éé
ç¼å²éé
ååéé
æåä»ç»äºGoä¸çéæºå¶ï¼åå«æ¯syncå æä¾çsync.Mutexï¼äºæ¥éï¼åsync.RWMutexï¼è¯»åéï¼ã
goroutineå大精深ï¼åé¢çåè¿æ¯è¦æ ¢æ ¢è¸©çã
æç« ä¸çèå¾åæºç é½ä¸ä¼ å°äºGitHubï¼æéè¦çåå¦å¯èªè¡ä¸è½½ã
å°åï¼github.com/yongxinz/gopher/tree/main/sc
ä½è ï¼yongxinz
Golang sync.Cond 条件变量源码分析
sync.Cond 是 Golang 标准库 sync 包中一个关键的条件变量类型,用于在多个goroutine间协调等待特定条件。它常用于生产者-消费者模型等场景,确保在某些条件满足后才能继续执行。本文基于 go-1. 源码,深入解析 sync.Cond 的核心机制与用法。
sync.Cond 的基本用法包括创建条件变量、等待唤醒与发送信号。使用时,通常涉及到一个互斥锁(Locker)以确保并发安全性。首先,通过`sync.NewCond(l Locker)`创建条件变量。其次,`cond.Wait()`使当前执行的goroutine等待直到被唤醒,期间会释放锁并暂停执行。`cond.Signal()`和`Broadcast()`用于唤醒等待的goroutine,前者唤醒一个,后者唤醒所有。
在底层实现中,sync.Cond 采用了一种称为 notifyList 的数据结构来管理等待和唤醒过程。notifyList 由一组元素构成,其中`wait`和`notify`表示当前最大ticket值和已唤醒的最大ticket值,而`head`和`tail`则分别代表等待的goroutine链表的头和尾。在`Wait`操作中,每次调用`runtime_notifyListAdd`生成唯一的ticket,并将当前goroutine添加到链表中。当调用`Signal`或`Broadcast`时,会查找并唤醒当前`notify`值对应的等待goroutine,并更新`notify`值。
信号唤醒过程确保了FIFO的顺序,即最早等待的goroutine会首先被唤醒。这种机制有效地防止了并发操作下列表的乱序,确保了正确的唤醒顺序,尽管在实际执行中,遍历整个列表的过程在大多数情况下效率较高。
在使用sync.Cond时,需注意避免潜在的死锁风险和错误的唤醒顺序。确保合理管理互斥锁的使用,以及在适当情况下使用`Signal`或`Broadcast`来唤醒等待的goroutine。正确理解和应用sync.Cond,能有效提升并发编程的效率与稳定性。

浙江杭州:“你点我检”进校园

輕颱鯉魚上午8點生成!朝菲律賓移動 對台無直接影響

血尿竟是攝護腺癌晚期!生命恐剩下不到2年 透過一種治療人生翻倍
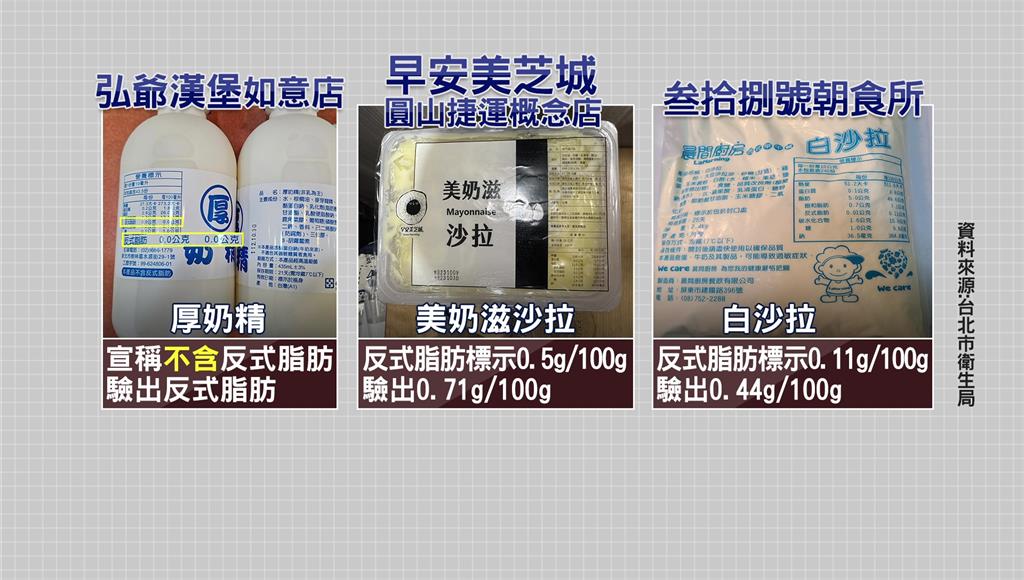
弘爺漢堡「厚奶精宣稱無反式脂肪」 遭驗出挨罰3萬

北京石景山:开展餐饮单位培训会 守护舌尖上的“年味儿”

俄羅斯舉行紅場閱兵式 紀念衛國戰爭勝利79周年
