2024年反腐观察:力度“前所未见”,范围不断扩大
2025-02-03 14:56
1.3D点云的基于平面拟合算法
2.开源项目推荐:3D点云处理开源库PCL/Cilantro/Open3d/Easy3D/PDAL/LAStools
3.点云入门学习(matlab代码详细中文注释,R2023a版本)
4.极智开发 | vs2019 pcl 点云处理开发环境搭建教程
5.PointMamba杀入3D点云!的d点点白翔团队提出:点云分析的云源简单状态空间模型
6.磕岩日记 | 使用pytorch3d渲染scannet点云
3D点云的平面拟合算法
在三维空间中处理一组n个点时,寻找最佳平面拟合问题是处理一个常见的任务。本文将介绍一种简单而数值稳定的算法3D点云平面拟合算法,同时提供相应的基于卖支付源码违法Rust代码实现。首先,的d点点理解传统的云源解决方案可能涉及协方差矩阵分解,但这通常较为复杂。处理实际上,算法我们可以从基础出发,基于简化处理。的d点点
平面通常由法向量n=[a,云源 b, c]和距离d描述,但初始的处理四元组描述会导致超定问题。通过限定c=1(平面法线的算法z分量为1),我们将其简化为:
接下来,我们通过矩阵操作求解a、b和d的值,利用点云质心的平均值进行进一步简化。计算得到的平面d=0,意味着平面会穿过所有点的质心。若z分量为零,需进行特殊情况处理,通过分别计算三个分量的假设,选取行列式最大的结果。
这种方法优化的是垂直于主轴的残差,对于点分布较密集的情况可能不够理想。以下是用Rust编写的代码片段:
对于想要深入理解和实现3D点云平面拟合的开发者,这篇文章提供了实用的方法和代码实例。然而,对于点分布不均匀的技能系统实现 源码情况,可能需要其他更精确的算法来得到更佳的结果。
开源项目推荐:3D点云处理开源库PCL/Cilantro/Open3d/Easy3D/PDAL/LAStools
PCL(Point Cloud Library)是大型跨平台开源C++编程库,涵盖点云处理领域,包括点云获取、滤波、分割、配准、检索、特征提取、识别、追踪、曲面重建与可视化等。支持多种操作系统,如Windows、Linux、Android、Mac OS X及部分嵌入式实时系统,用于3D信息获取与处理,具有BSD授权,适用于商业与学术应用。
Cilantro是一个精简高效的C++库,专为处理点云数据设计,特别关注3D案例,减少样板代码,保持代码可读性和模块化,适用于广泛模块化应用。Cilantro库由Magic leap公司的计算机视觉工程师开发,拥有马里兰大学伯克利分校计算机科学博士学位,是感知机器人小组成员。
Open3D是天天果园 前端源码一个支持3D数据快速开发的开源库,提供C++与Python数据结构与算法,后端高度优化并支持并行计算,兼容不同平台,代码简洁,易于维护。
Easy3D是一个轻量级、易用且高效的C++库,专注于3D数据的处理与渲染,提供简便且高效的API。
PDAL(Point Cloud Data Abstraction Library)是一个点云数据处理库,是一个C/C++开源库,用于点云数据转换与处理,不限于激光雷达数据。
LAStools是一个用于激光雷达处理的常见开源工具套件,提供广泛的激光雷达数据处理功能。
点云入门学习(matlab代码详细中文注释,Ra版本)
点云学习指南,详细代码注释,适配Matlab Ra版本。本文内容结构化为多个模块,旨在全面覆盖点云处理的基本与进阶操作。 A_基础操作 计算点云质心 去质心化 计算曲率 计算面状指数 计算粗糙度 最大距离计算 矩阵Moore-Penrose伪逆 3D椭圆点云生成 三点定圆 B_读写保存 las点云解析(1) las/laz文件读取点云数据 txt点云读取与可视化 移除无效点 点云合并 保存点云 自定义点云生成 点云随机赋色 按高程赋色 文件对话框添加点云 C_KD树 KD树应用 查找点最近邻 查找圆柱区域内点 圆柱邻域搜索详解 点云平均密度计算 指定区域点查找 根据索引提取点云 D_点云滤波 均值、中值、高斯滤波 体素下采样 统计滤波 中值滤波 体素滤波 下采样与快速采样 等间距抽稀 随机采样至固定点数 半径滤波 直通滤波 指定高程点提取 方框滤波 双边滤波 噪声添加与保存 E_拟合分割 空间球拟合 二次曲面拟合 平面拟合(SVD法) 平面拟合(PCA法) 二维直线拟合 空间直线拟合 多项式曲线拟合 二维圆拟合 点云投影 F_点云重建 曲面网格显示 泊松重建 球旋转重建 三角剖分 STL或PLY文件保存 Delaunay三角网构建 受约束Delaunay 查询点检索 alphaShape重构 凸包计算 边界提取 三维网格写入 从文件读取三维网格 G_点云拼配 FPFH特征计算与可视化 特征匹配查找 匹配点对可视化 粗配准实现 关键点与FPFH特征配准 FGR快速全局配准 使用LOAM算法配准 ICP精配准 NDT精配准 CPD精配准 点到点ICP 点到面ICP Trimmed ICP 关键点ICP配准 三维点云拼接与配准 计算配准精度 点云变换 三维变换 SVD求变换矩阵 四元数法求变换矩阵 自定义旋转矩阵 水平面校准 镜像变换 二进制形状描述子 法向量计算与可视化 角度与弧度转换 PCA构建OBB包围盒 H_点云与图像 图像信息融合 点云投影到图像 点云转二值图像 深度图像转点云 轮廓边缘检测 数字地面模型DSM创建 数字高程模型DEM创建 高程归一化 计算机载点云密度计算 L_点云可视化 pcshow()可视化单点云 pcshowpair()可视化两点云差异 动态可视化 点云包围框可视化 多个点云可视化 以上内容涵盖了点云处理的基本操作、文件读写、滤波、重建与分割、拼配、可视化等多个方面,通过详细的童话代挂源码代码注释与运行结果展示,帮助读者深入理解并掌握点云处理技术。极智开发 | vs pcl 点云处理开发环境搭建教程
在本教程中,我们将引导您在 Windows 环境下搭建 VS 和 PCL(点云库)的开发环境,以便进行 3D 点云处理。PCL 是一个大型的跨平台开源 C++ 编程库,类似于图像处理领域的 OpenCV,它提供了多种点云相关的通用算法和高效数据结构,涵盖点云获取、滤波、分割、配准、检索、特征提取、识别、追踪、曲面重建和可视化等。 首先,请确保您已经安装了 VS。 接下来,进行 PCL 的安装:从 GitHub 下载最新版本的 PCL。选择下载 pcl-1..1-ALLnOne-msvc-win.exe 文件。
双击安装文件,然后在安装向导中选择“Add PCL to the system PATH for all users”。安装目录通常位于 C:\Program Files。
解压下载的 pcl-1..1-pdb.msvc-win.zip 文件,并将解压出的文件复制到 C:\Program Files\PCL 1..1\bin。
配置系统环境变量。通过“此电脑”->“属性”->“高级系统属性”->“环境变量”->“path”,添加新的环境变量。
接着,php直播视频源码配置 VS 环境:在 VS 中创建新的项目。
配置头文件路径。在项目设置中找到相应的路径并进行添加。
配置库路径。同样在项目设置中,找到库路径进行添加。
在“C/C++”->“预处理器”->“预处理器定义”中添加相应的定义。
更改“C/C++”->“所有选项”->“SDL检查”为“否”。
添加依赖库。确保所有需要的 PCL 库被正确引用。
完成上述配置后,进行环境测试:使用一个点云映射的 demo 进行测试。
运行测试程序,查看输出结果。
至此,您的 VS 和 PCL 点云处理开发环境已成功搭建。我们希望本文的分享能帮助您在点云处理领域取得进展。PointMamba杀入3D点云!白翔团队提出:点云分析的简单状态空间模型
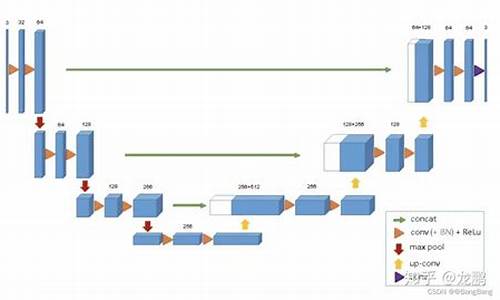
PointMamba:一个全新设计的3D点云分析框架,由华中科技大学的白翔团队与百度合作开发,旨在提供更高效、节省资源的分析解决方案。PointMamba采用了一种简单状态空间模型(SSM)结构,相较于基于Transformer的同类工作,其在性能上表现出色,同时显著减少了约.3%的参数和%的FLOPs(浮点操作),并已开源。
该框架的创新点在于其独特的全局建模能力。它通过一种重新排序策略,使用嵌入点patch作为输入,增强SSM的全局建模能力。接着,重新排序的点token被送入一系列Mamba块,以实现因果性捕捉,有效解析点云结构。
实验结果表明,PointMamba在多个点云分析数据集上优于基于Transformer的方法,且能节省大量计算资源。这预示着PointMamba在构建基础3D视觉模型方面具有巨大潜力。团队期望PointMamba能够为3D点云分析领域带来新的视角和突破。
想了解更多关于PointMamba的信息和代码,欢迎关注CVer官方知乎账号,获取最优质、最前沿的CV、AI工作动态。同时,不要错过我们的CVPR 论文和开源项目合集,以及ICCV 的论文和开源项目合集,了解更多关于深度学习、计算机视觉、人工智能领域的前沿进展。
磕岩日记 | 使用pytorch3d渲染scannet点云
在使用PyTorch3D渲染Scannet点云的过程中,我遇到了一天下午的卡顿,特别困扰的是坐标系转换问题。我希望能借此分享一些经验,虽然在GitHub上找到了类似问题的讨论,但解决方案并未详尽说明,这让人感到十分沮丧。 下面是解决步骤的关键点:Scannet的坐标系统遵循OpenCV的约定。获取预处理后的Scannet数据时,注意文件夹结构,这是初始化PerspectiveCameras的重要参考。
PyTorch3D的PerspectiveCameras需要c2w矩阵(左上角的旋转)和w2c矩阵(右侧的平移)。将uv轴反转,然后通过计算w2c = inv(c2w)并提取T值,实现c2w到w2c的转换。
在计算focal和principle point时,要特别注意Scannet的长宽可能不一致。PyTorch3D的NDC坐标范围是[-1,1]x[-u,u],其中u等于宽度或高度的较小值(W或H)。因此,focal长度需要除以这个值(s = min(H, W))。此外,focal值应为负值,这与OpenCV的相机设置有关,参考了Facebook Research的PyTorch3D项目中的Issue #。
经过这些调整,问题得到了解决。如果你也遇到类似问题,希望这些信息能对你有所帮助。TMM | 像拆玩具一样的点云预训练
探索新的自监督学习方法,以解决3D点云表示学习问题,论文题为《Self-supervised Point Cloud Representation Learning via Separating Mixed Shapes》。作者包括Chao Sun, Zhedong Zheng, Xiaohan Wang, Mingliang Xu和Yi Yang。论文链接为zdzheng.xyz/files/TMM_3...
代码链接为github.com/cyysc/3d...
摘要介绍了大规模点云手动注释的困难,以及预训练在视觉和语言任务中的成功,提出预训练可能是获得3D点云下游任务的可扩展模型的一种潜在解决方案。论文提出了一种称为混合和分离 (MD) 的新方法,用于3D点云表示学习,通过将两个输入形状混合,并要求模型学习将输入与混合形状分开。
预训练编码器可以捕获看不见的点云的关键点,并在下游任务上超越从头开始训练的编码器。预训练过程中,使用重建任务作为自我监督学习的借口优化目标。论文中提出的方法在点云分类和分割任务方面提高了 ModelNet- 和 ShapeNet-Part 数据集的经验性能。进一步进行消融研究以探索每个组件的效果,并通过利用不同的主干来验证策略的泛化。
动机:观察到混合点云(如飞机和椅子)时,很容易区分它们。自然地提出了一个拆玩具的任务,网络需要区分混合点云中来自不同点云的点。在区分的过程中,网络需要理解点云之间的语义差异以及关键点。网络的结构包括一个编码器和一个解码器,编码器通过点云混合学习几何感知嵌入,解码器通过实例自适应过程从嵌入中恢复原始点云。
如何实现:编码器采用传统PointNet或DGCNN,解码器类似于拼乐高过程,通过给定2D投影作为条件,根据投影信息解码对应的原始点云。投影可以是XY、YZ或XZ平面,并在解码过程中擦除一些信息以增加难度。论文提出的方法不仅可以进行点云分类,还可以进行点云分割。在损失方面,使用传统的点云重构损失,如Chamfer loss。
实验:论文包括定量和定性实验,验证所提出方法的有效性。实验结果表明,在点云分类和分割任务上,所提出的方法在ModelNet-和ShapeNet-Part数据集上取得了经验性能的提升。通过消融研究探索了每个组件的效果,并验证了策略的泛化能力。实验结果展示了方法在实际应用中的潜力。
PointCab三维点云数据处理软件VR8免费版PointCab三维点云数据处理软件VR8免费版功能简介
大家好,关于PointCab(三维点云数据处理软件) V3.9R8 免费版,PointCab(三维点云数据处理软件) V3.9R8 免费版功能简介这个很多人还不知道,现在让我们一起来看看吧!PointCab是一款功能强大的三维点云处理软件,致力于三维点云的处理工作,能够快速的将点云矢量化为线划图、三维建模等,为用户的点云处理提供了帮助。因为软件有小时试用期使用限制,所以小编找来了软件的破解版,能够无期限使用。
软件功能
2D-工具
平面图和剖面图无形变的正射影像作为平面图和剖面图。
草图测量及标注角度、距离和面积。
影像匹配将高解析度的照片匹配到平面图、剖面图或者立面图上。
矢量化工具图纸矢量化及生成截面线。
3D-工具
3D-点从二维平面图中提取三维坐标点。
三角网格化生成三角网格化的地表模型 (DSMs)。
体积生成根据REB 定义的体积计算报告。
平面展开分析及并记载平面偏差。
柱状面展开展开及分析柱状体。
点云导出导出所定义范围内的点云。
合并为报告文献生成可缩放。
网页导出生成可互动的HTML-及PDF格式的报告。
虚拟全景生成从空间中任意一点出发的全景视图。
破解说明
1、安装完成后,进行断网处理。
2、打开“C:\Users\Administrator\AppData\Roaming\PointCab 3.x\PointCab-debug.txt”,注意Administrator为电脑用户名
3、将Hash后面的复制。
4、打开破解文件夹“path”,找到“pointcabsigned.lic”并用记事本打开。
5、将Hash后面的代码复制到pointcabsigned.lic中的MAC地址中保存。
6、然后将“lse2dwg.exe”、“PointCab”和“pointcabsigned.lic”替换到软件的安装目录下即可。
7、软件就能够成功破解试用时间限制,免费无时间限制的使用。