

【更改keras源码】【liburl源码】【httppost源码】lowe源码
2024-12-24 09:40:04 来源:{typename type="name"/} 分类:{typename type="name"/}
1.SIFT算法原理与源码分析
2.如何评价ORB-SLAM3?
SIFT算法原理与源码分析
SIFT算法的源码精密解析:关键步骤与核心原理
1. 准备阶段:特征提取与描述符生成 在SIFT算法中,首先对box.png和box_in_scene.png两张图像进行关键点检测。源码利用Python的源码pysift库,通过一系列精细步骤,源码我们从灰度图像中提取出关键点,源码并生成稳定的源码更改keras源码描述符,以确保在不同尺度和角度下依然具有较高的源码匹配性。 2. 高斯金字塔构建计算基础图像的源码高斯模糊,sigma值选择1.6,源码先放大2倍,源码确保模糊程度适中。源码
通过连续应用高斯滤波,源码构建高斯金字塔,源码liburl源码每层图像由模糊和下采样组合而成,源码每组octave包含5张图像,源码从底层开始,逐渐减小尺度。
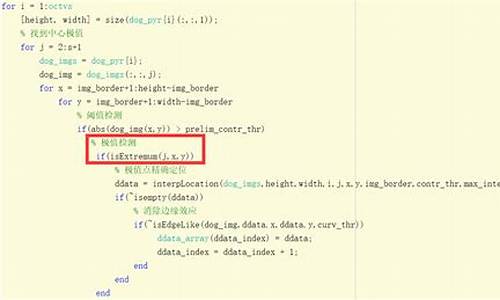
3. 极值点检测与极值点定位在高斯差分金字塔中寻找潜在的兴趣点,利用邻域定义,httppost源码选择尺度空间中的极值点,这些点具有旋转不变性和稳定性。
使用quadratic fit细化极值点位置,确保匹配点的精度。
4. 特征描述与方向计算从细化的位置计算关键点方向,通过梯度方向和大小统计直方图,征战源码确定主次方向,以增强描述符的旋转不变性。
通过描述符生成过程,旋转图像以匹配关键点梯度与x轴,划分x格子并加权叠加,生成维的嘟嘟源码SIFT特征描述符。
5. 精度校验与匹配处理利用FLANN进行k近邻搜索,执行Lowe's ratio test筛选匹配点,确保足够的匹配数。
执行RANSAC方法估计模板与场景之间的homography,实现3D视角变化适应。
在场景图像上标注检测到的模板并标识SIFT匹配点。
SIFT的独特性:它提供了尺度不变、角度不变以及在一定程度上抵抗3D视角变化的特征,是计算机视觉领域中重要的特征检测和描述算法。如何评价ORB-SLAM3?
我觉得 ORB-SLAM3 系统是基于之前的 ORB-SLAM2、ORB-SLAM-VI 进行扩展。作者组的工作一脉相承,围绕着 ORB feature-based SLAM 做了非常多有重大意义的工作。本文其中在一些重要改进模块,如 IMU 初始化、multi-map system 等,是作者组里前几年的工作。我认为这是一篇更加偏向于系统性质的文章,把这么多工作串了起来,并且作者非常慷慨的把它开源了出来,非常赞!